Med internationellt ledande teknologi vill vi skapa tillväxt på hemmaplan.
Montering
Översikt
Montering och demontering med MOTOMAN-robot
Industrirobotar kan användas för att automatisera uppgiften att sätta ihop eller ta isär en produkt, som t.ex fordonsdetaljer, möbler eller elektronikkomponenter. Roboten kan antingen använda ett monteringsverktyg, eller flytta arbetsstycket till och från en stationär monteringsstation.
Vad innebär robotmontering?
Montering, och demontering, är en samordnad sekvens och en kombination av många enskilda moment, som att identifiera detaljer, sortera, mata fram, greppa, fästa, sammanfoga, göra en kvalitetskontroll och mycket mer. Roboten befinner sig mitt i ett kommunikationsflöde med data som skickas till och från verktyget, PLC-utrustning och tillverkningssystem (Manufacturing Execution Systems). En spännande utmaning för en robot!
Konstruera för robotmontering
Se till att inkommande detaljer är sorterade och så bra placerade som möjligt för roboten. En fixtur kan användas både till att hålla upp delar som ska monteras eller för att hålla fast dem under tiden de monteras ihop.
Robotmontering är anpassningsbar
Montering med robot är mer flexibelt och anpassningsbart när det gäller variationer i detaljer, jobb och arbetsflöde jämfört med en kedja av produktionsmaskiner för sammanfogning.
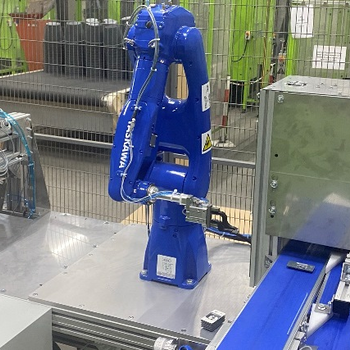
Vilka robotmodeller passar bäst för montering?
6 eller 7-axliga robotar (GP, MH, SIA)
Vanligtvis rekommenderar vi 6-axliga robotar i GP-serien för monteringsjobb, tillsammans med våra YRC1000- eller YRC1000micro styrsystem. De är mångsidiga, snabba, med hög precision och alla alternativ för mediaförsörjning och anslutning som krävs. Rörelseförmågan hos en 7-axlig robot i SIA-serien är ännu bättre för smala utrymmen.
Montering med sammarbetsrobotar i HC-serien
Med en samarbetsrobot kan operatören dela upp uppgifterna mellan sig och roboten. Varför inte använda en skärm för att visa vad som ska göras och i vilken ordning, för att säkerställa kvaliteten på slutresultatet.
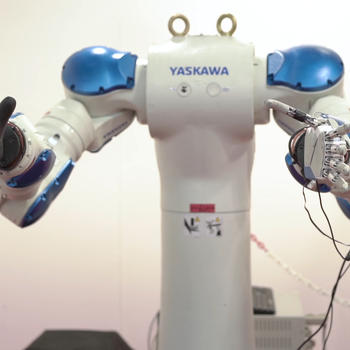
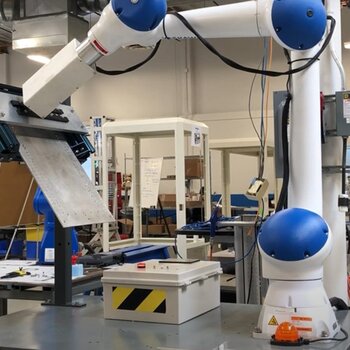
Tvåarmsrobotar för montering
Att använda en robot med två armar för att automatisera en monteringsuppgift är ganska enkelt - låt roboten kopiera rörelsen hos den som jobbar manuellt. En lyckad installation av en tvåarmsrobot som SDA, börjar dock ofta med en inspirerad applikationsidé, att våga göra saker annorlunda, vara innovativ och radikal - vilken är din idé?
Using a dual arm robot to automate assembly tasks is pretty straight forward - let the robot copy the scope of a manual worker. However, a successful installation of an SDA Dual Arm robot often starts with an inspired application idea, doing things different, being innovative, radical or disruptive – what is your idea?
Robotmontering med hjälp av 2D/3D kamerasystem
För mer avancerade användningsområden förlitar vi oss på ett nätverk av professionella tillverkare av kamerasystem för automatisering. Som robotleverantör ser vi bara till att dessa system är fullt möjliga att integrera med vårt robotstyrsystem. Många integratörer och tillverkare av system för maskinseende har också stor erfarenhet av Motomanrobotar.
But when it comes to more advanced or sophisticated vision applications, we rely on our network of professional Machine Vision experts. As a robot supplier, we just make sure that those vision systems can be seamlessly integrated with our robot systems, providing easy integration interfaces like VSTART.
Our Motoplus C++ SDK Software Development Kit provides comfortable APIs for effective and fast software driver development, including the wide ROS community. But in many cases we do not need to start from scratch. Many system integrators and machine vision suppliers in our worldwide partner network have excellent integration experience with Motoman Robots, and we ourselves can fall back to our rich repository of interface and software driver solutions to ensure that it works.
Använd servofloat i känsliga lägen
YASKAWA Servofloat är ett utmärkt sätt växla ner robotrörelsen till ett följsamt läge som gör det möjligt att sammanfoga med snäva toleranser, eller där det är svår att programmera med exakthet. Känsligheten kan omfatta en enskild robotaxel, eller kombinationer av robotaxlar.
Robotmontering med extra hög känslighet - MotoFit
Om vanliga funktioner för kraftbegränsning, som Force limitation eller Servofloat, inte räcker till krävs någon form av sensor för att känna av kraften vid montering eller åtdragning som MotoFit monteringsverktyg till exempel.
Med digitala och analoga ingångar, integrerat Ethernet och fältbussgränssnitt finns många möjligheter till andra skräddarsydda lösningar med våra styrsystem. Och om det inte räcker till, kan du ta fram dina egna lösningar med hjälp av MotoPlus SDK utvecklingsverktyg för mjukvaror.
Sensitive Assembly Operations with Force Feedback can be trained by neural networks.
Robotverktyg och verktygsväxlare
Vid montering, precis som vid hantering, är gripdonets utformning avgörande för hur framgångsrik robotanvändningen blir. YASKAWA samarbetar med ett brett nätverk av tillverkare av robotverktyg. Vi drar nytta av deras kunskap och konstruerar våra hårdvaru- och mjukvarugränssnitt som ger bästa möjliga funktionalitet med våra robotar.
Mångsidiga verktyg
Robotmonteringsjobb är ofta mycket mångsidiga. Det är många olika delar eller enheter som ska greppas i olika monteringssteg. Robotverktyget kan utformas för att täcka denna flexibilitet, antingen genom att lägga till flera ”robotfingrar” eller vrida på robotens handled, använda verktyg mer flera lägen eller verktygsväxlare.
Automatic Gripper Tool Changers
When the gripper design compexity reaches it's limits, tool changers always work. YASKAWA robot controllers support quick automatic docking procedures with fast recovery of electric/fieldbus/pneumatic signal exchange, and are able to manage a large library of different tools.
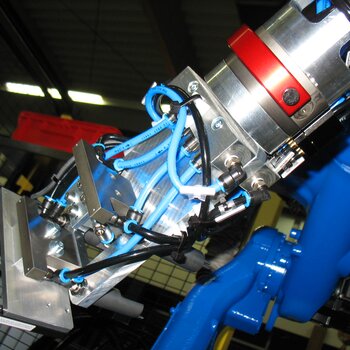
Göra robotgripdon och robotfingrar med 3D skrivare
Tekniken med 3D-utskrifter används även för att göra robotgripdon, robotfingrar och reservdelar till dessa fingrar. Resultatet är gripverktyg som trots att de är lätta ändå innehåller alla viktiga funktioner som t.ex pneumatik. Dessutom kan de skrivas ut på några minuter. Ett bra sätt att testa fram rätt robotverktyg för en monterande Motomanrobot.